︎
YI YANG
︎
Selected Works
︎ Bio/CV
︎︎︎ Contact
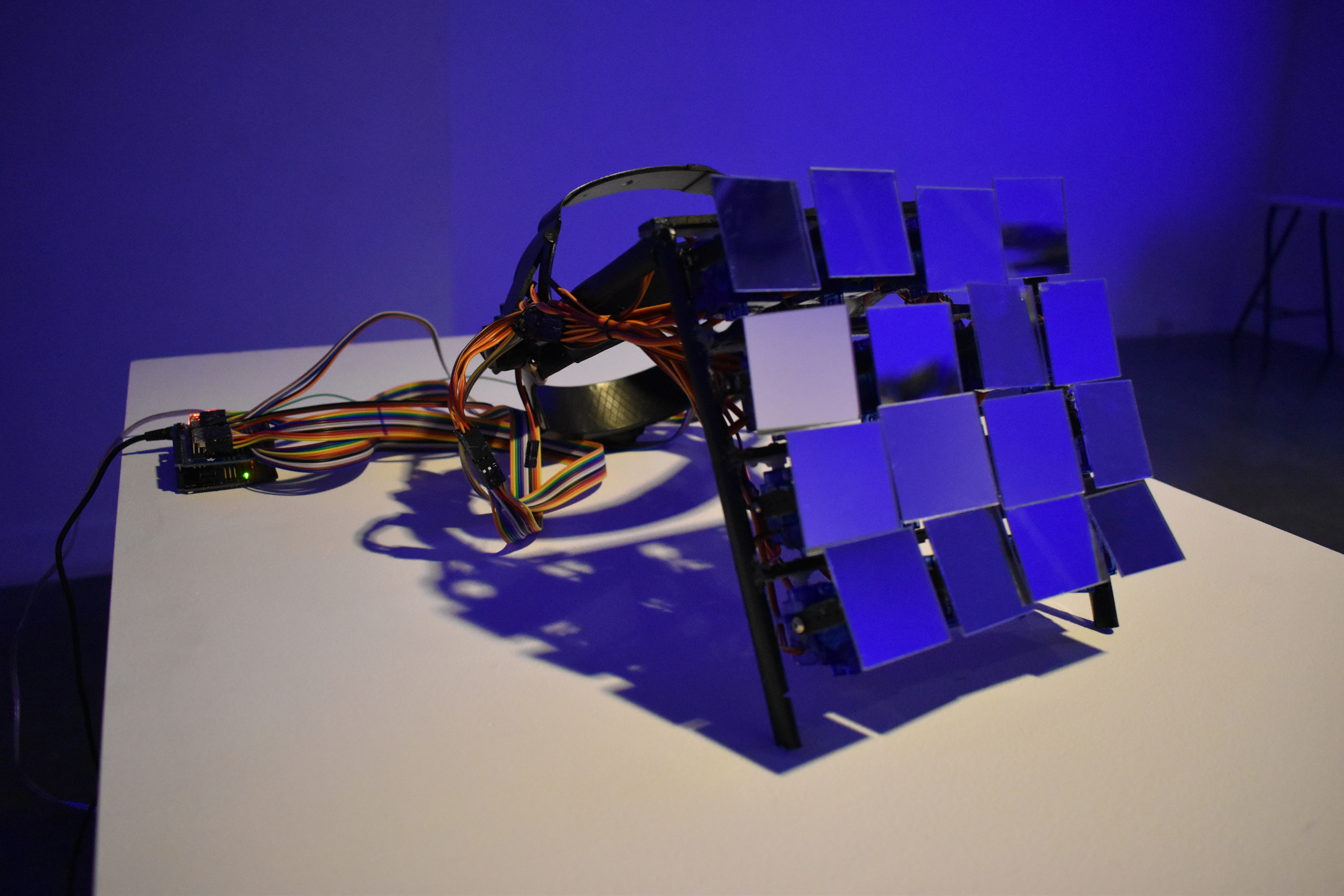
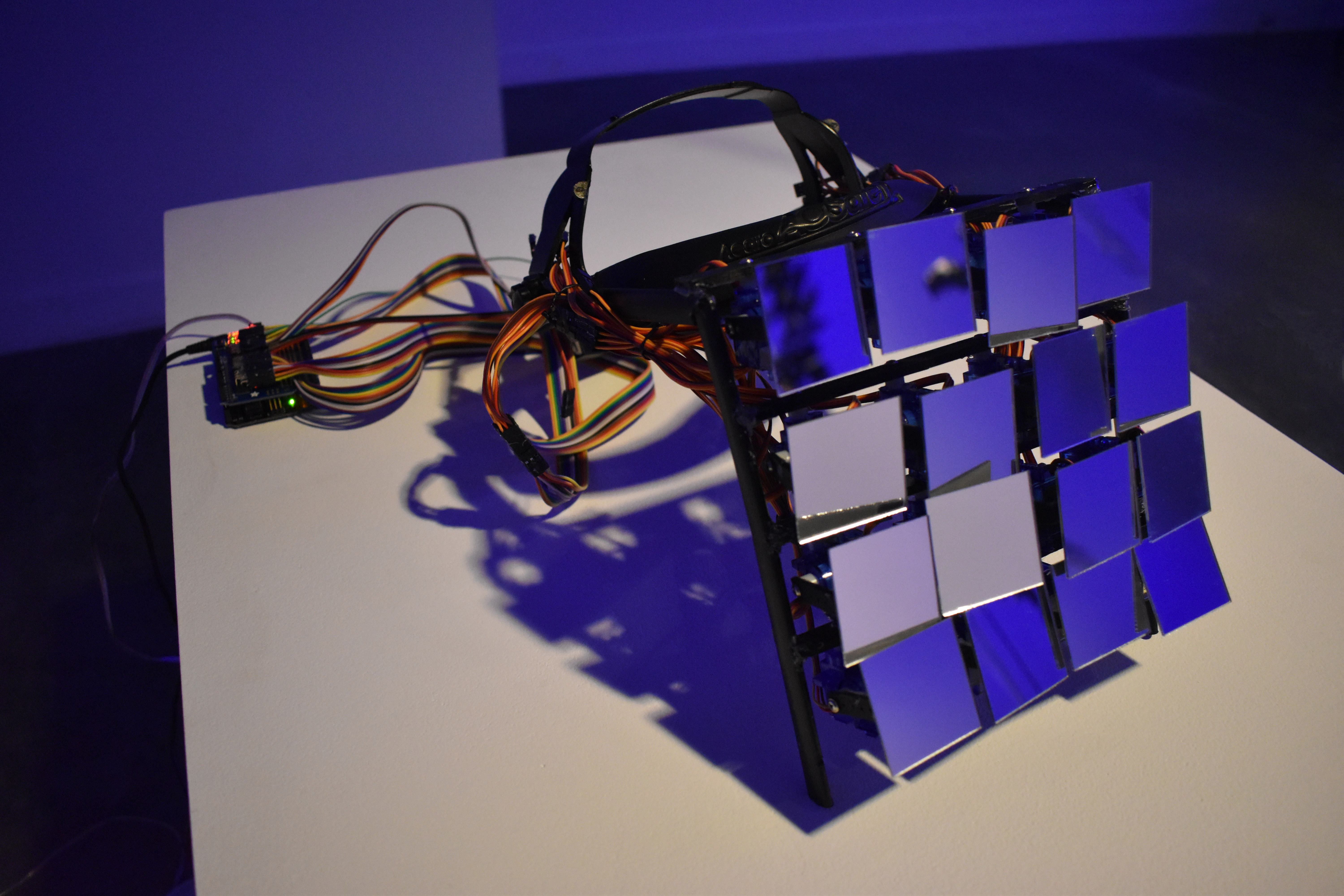
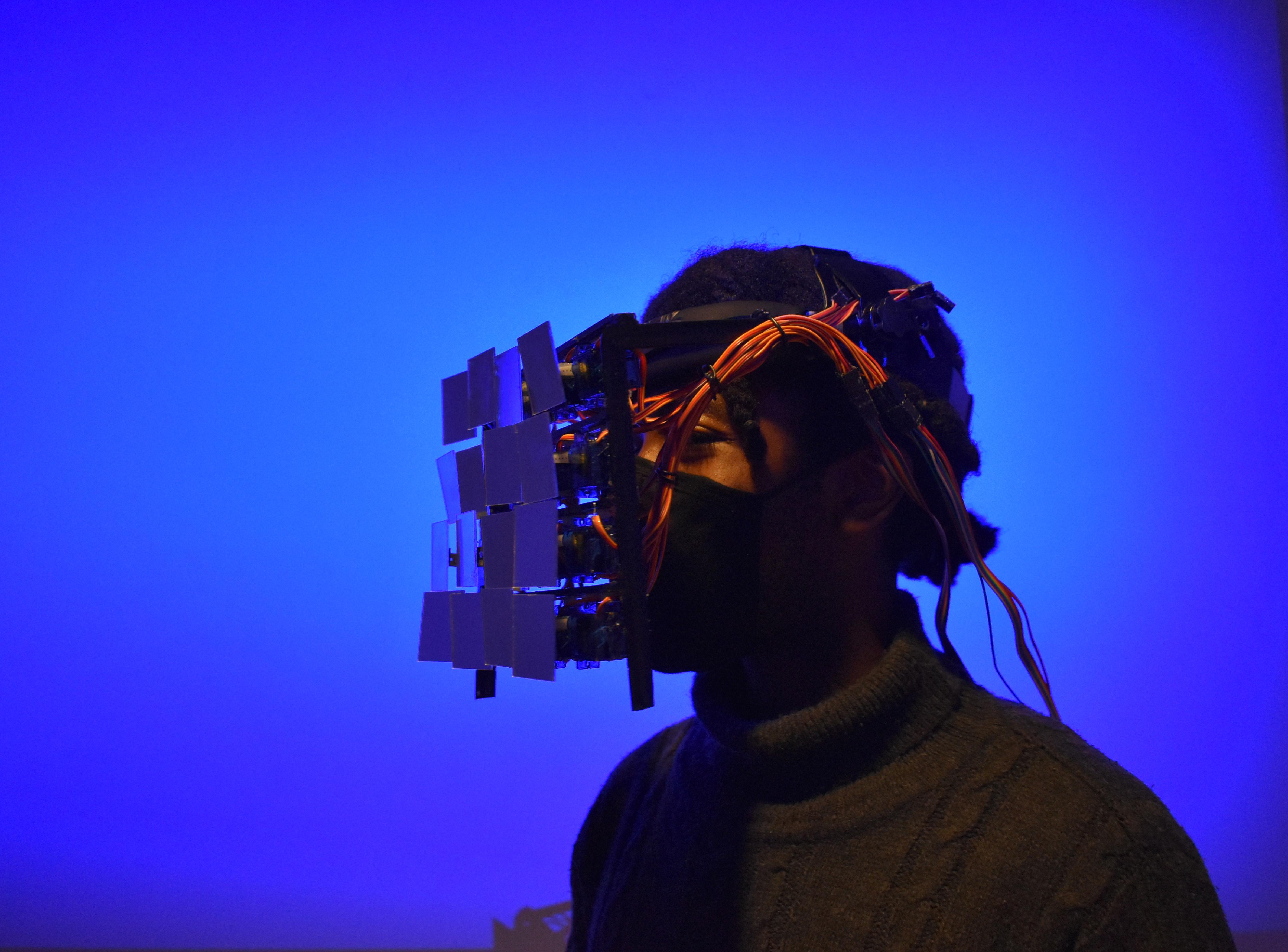
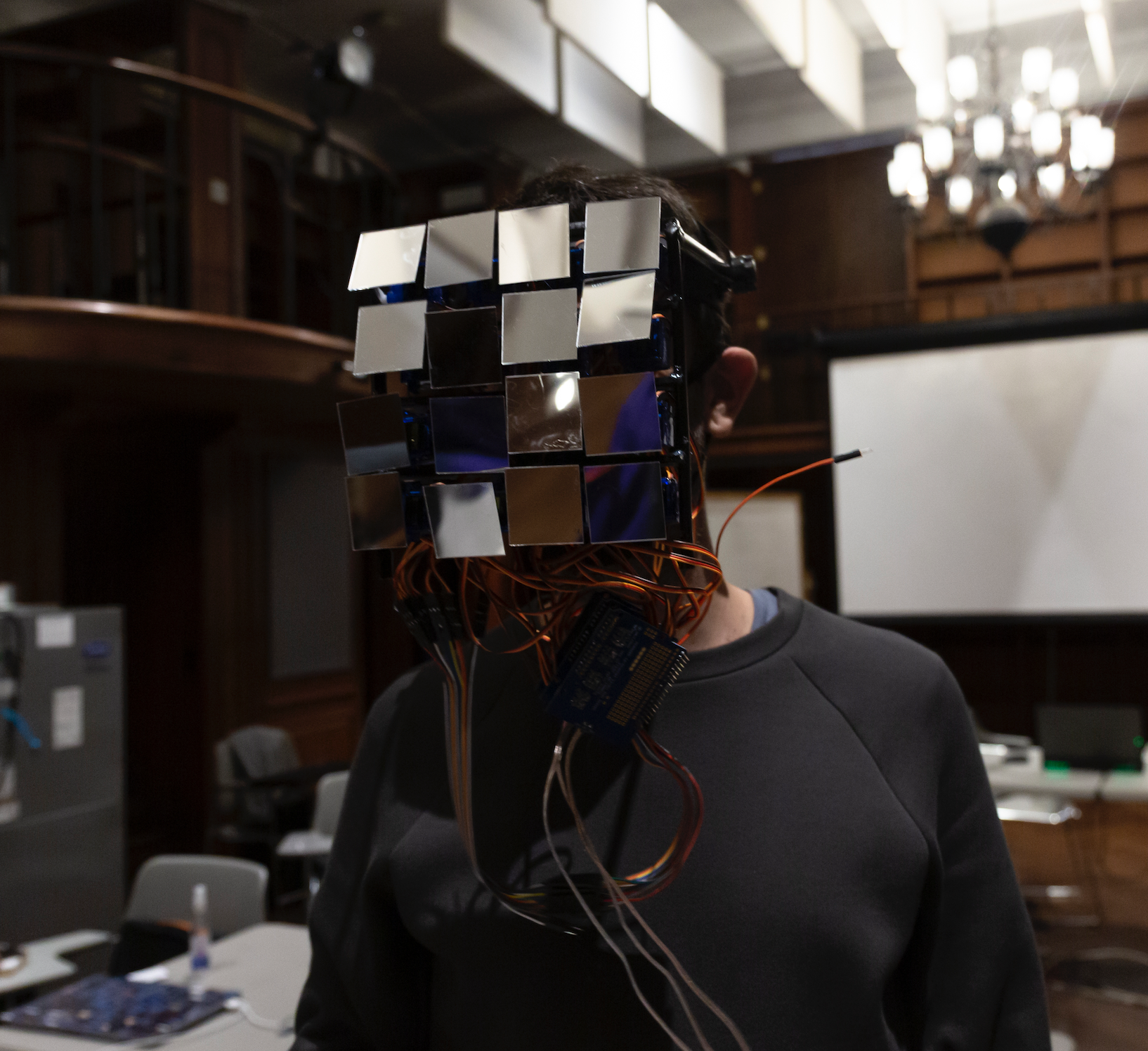
Gaze Machine
2020
Materials: Servo, mirror, webcam