︎
YI YANG
︎
Selected Works
︎ Bio/CV
︎︎︎ Contact
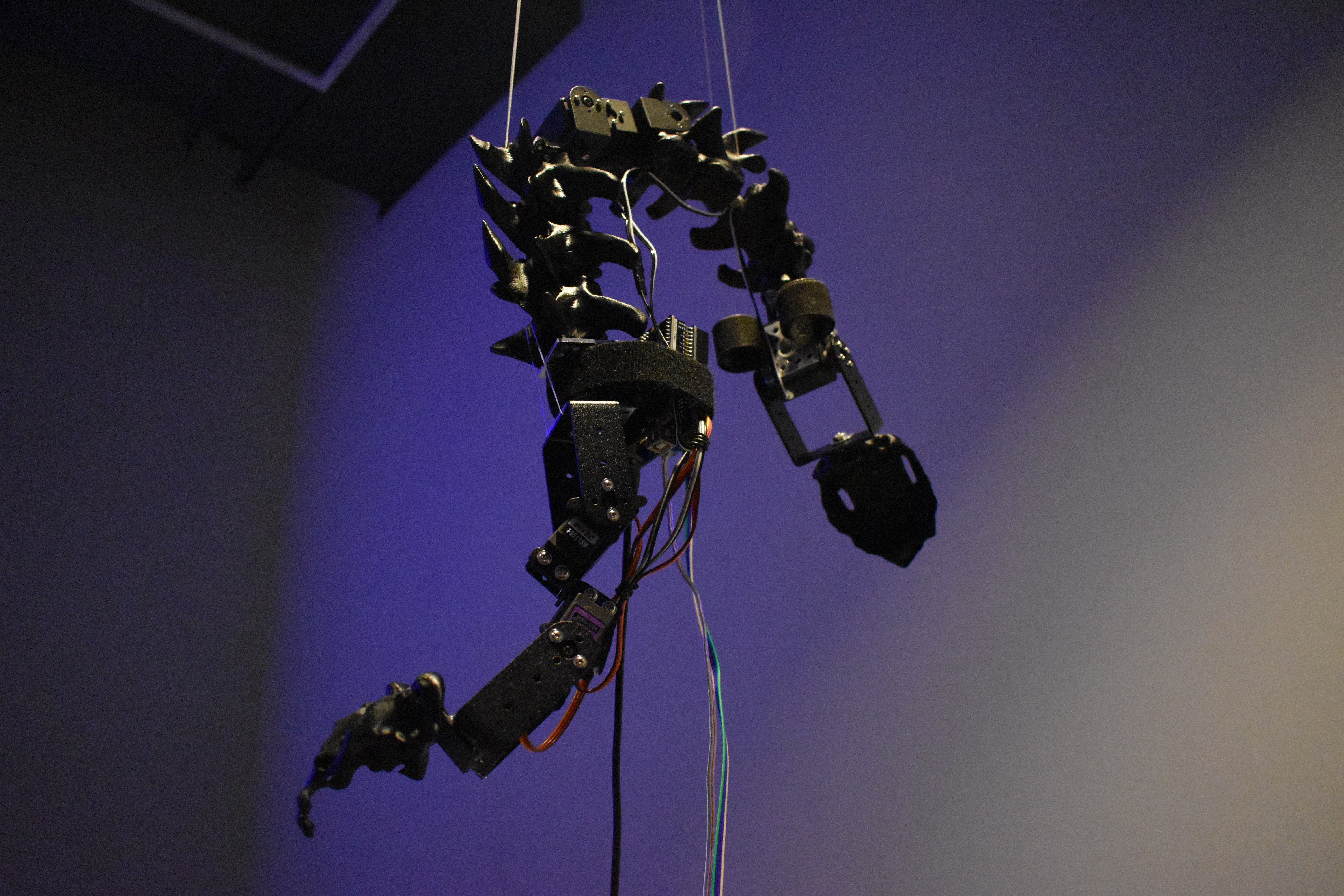
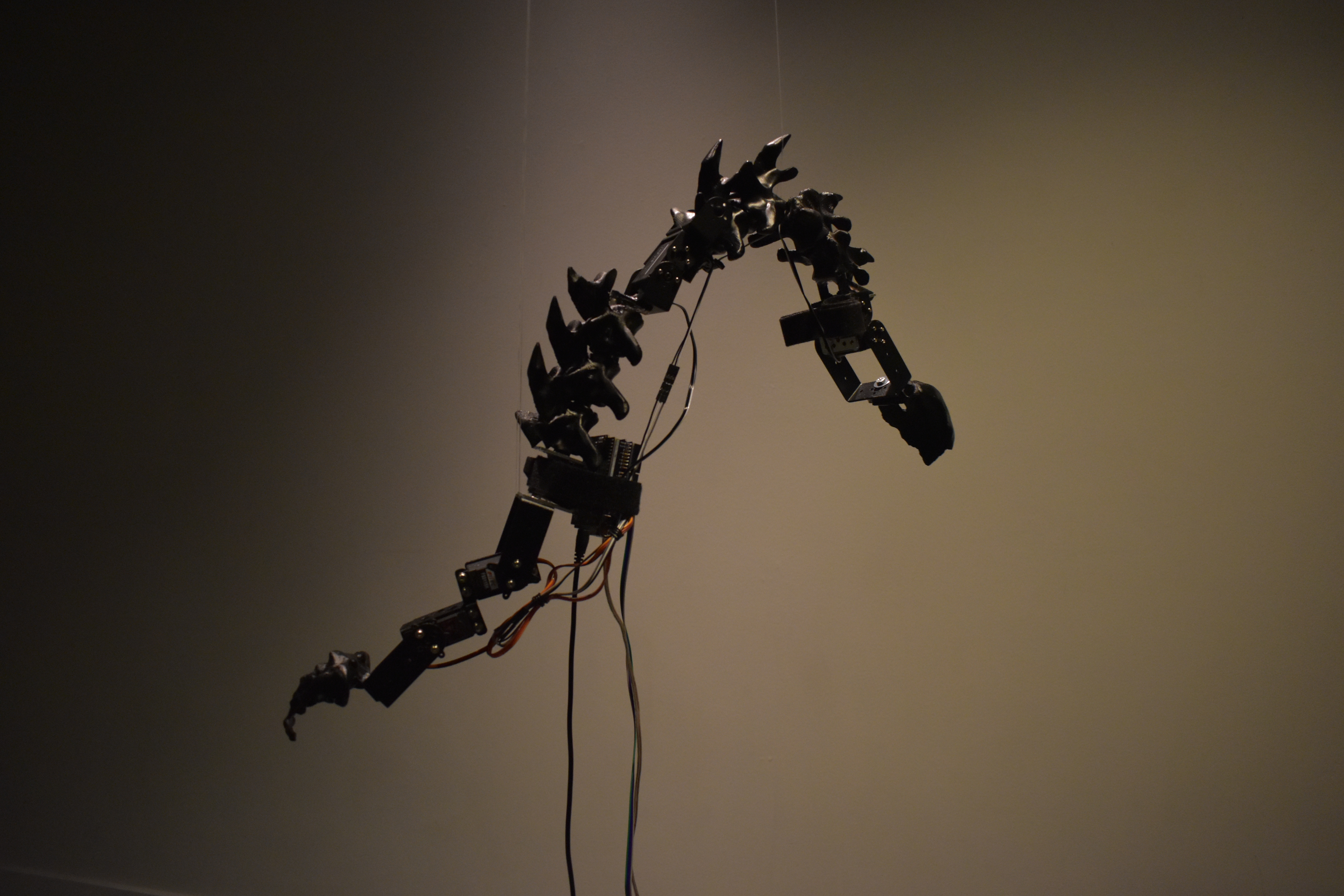
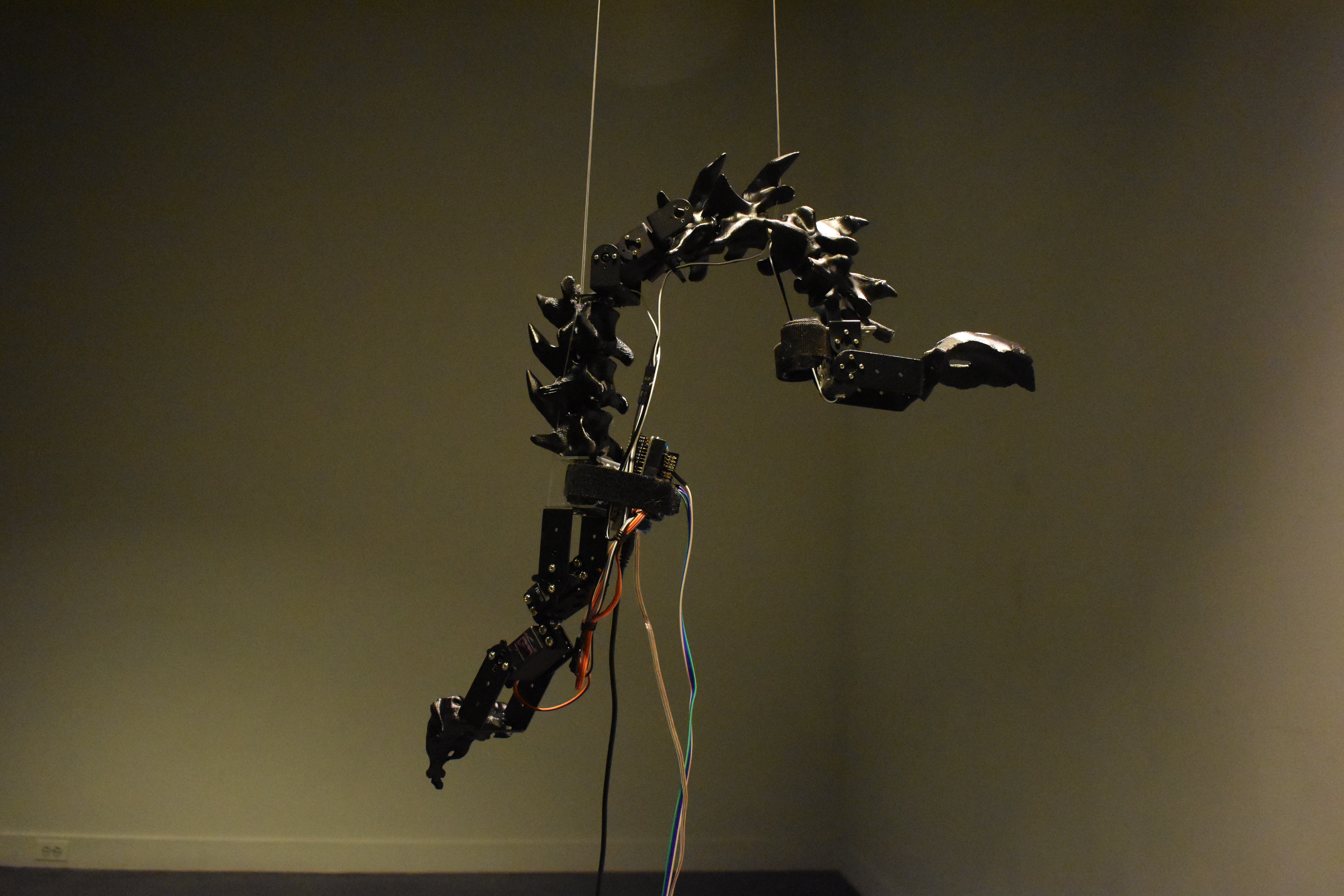
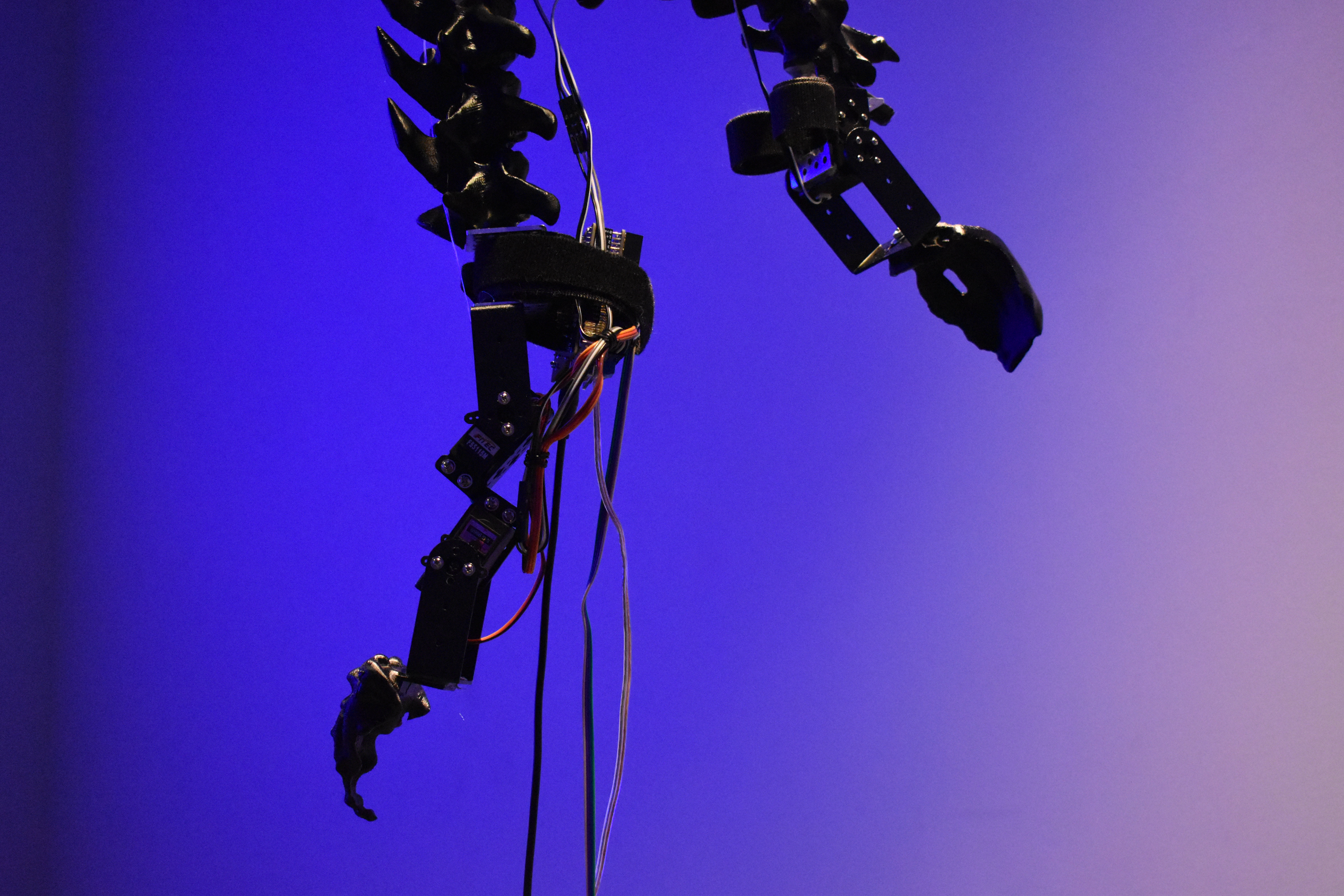
The Second Spine
,
2022
Materials: resin, servo, sensor